








|
|
 點閱數:44735 點閱數:44735船航行在大洋中,向四面看去,都是天連海、海連天,在船上的人如何知道自己現在在哪裡?將要航向哪裡去?想當航海家,需要學的第一件事就是航行定位。早期的航海家藉著沿岸的地形地貌,和天上日月星辰的位置,推算自己的船是在地球上的哪一個角落。現代科技藉由人造衛星上發射的信號,可以快速又正確的解讀出經緯度,以標定船隻現在的位置。 地文定位是船隻利用地形、地貌的資訊,標定船隻位置的方法。船在沿岸航行與在大洋航行的時候,他們所用的航行定位方法不同。 沿岸航行是指在可以看到海岸的情況下,利用沿岸的山丘或是燈塔等明顯的目標來定位,在海圖上繪製出船的位置。這需要利用羅經、方位圈、測深儀、海圖等工具。 若在大洋中航行,則需先以天文定位或其他方法確定船位,並將船位標示在海圖上,再由這已經知道的過去船位,推算出現在的船位。方法是藉測定船的速度、航程、方向等,來做推算航行定位。這需要利用海圖、羅經、船速計等工具。 羅經
在海上航行指引方向,需要以羅經作為主要工具。羅經種類很多,以下介紹較常見之磁羅經、電羅經與衛星羅經。 磁羅經(Magnetic compass)
是利用磁石指向地磁北極的特性,來作為指示方向的航海儀器。磁羅經盤面是圓形,並且標示出刻度,由0度順時鐘方向至360度,作為方位的代碼。 
羅經盤面的方位顯示
電羅經(Gyro compass)
以高速旋轉儀(gyroscope)的「慣性」(rigidity)及「偏移性」(precession)原理,使正北方位的指示不會隨著船舶的轉向而改變,而達到指示方向的功用。現在有以光通過光纖線圈測量地球自轉速度的電羅經,同樣可以指示出正北的方位。 衛星羅經(Satellite compass)
是以接收全球衛星定位系統(GPS)的信號,轉換為方位指示信號,供操船者判讀 方位圈
方位圈(Azimuthcircle)是設置在船上的磁羅經(Magneticcompass)或電羅經(Gyrocompass)上,作為目視測定船位的工具。在天氣晴朗時,利用方位圈測量並讀出陸地上目標(如燈塔、山頂等明顯的目標)和正北方向的夾角,需至少測量兩個目標以上,並在海圖上找出所測量目標作為基點,將這條和正北方夾角的直線繪出,兩個目標兩條直線的交叉點,就是船的位置。 
方位圈是置放於羅經上方的觀測工具
測深儀
測深儀(Echo sounder)是探測海底深度的儀器。在船底裝設音鼓,向海底發射音波,並接收聲音的回音,計算發射與接收間的時間差,以推算並顯示海底深度的儀器。顯示方式可以同時有數位式和圖表式兩種方式。利用測深儀測量水深,並對照海圖上標示的水深,以推測船的位置。 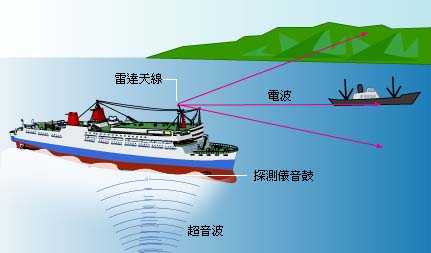
曳繩測速(程)儀
曳繩測速(程)儀(Tow line type speed log)的原理和機車上的測速、測程表是相同的,它是將一個轉子連帶曳繩拖在船艉,轉子因在水中拖曳而轉動,轉動之快慢與船速成比例,繩子固定在轉子上也跟著轉動,繩子在連接到船上的紀錄器,帶動指針而指出讀數,此讀數是航程,將航程除以單位時間就得到速度。 
曳繩測速(程)儀的紀錄器
現代商船大都已經改用都卜勒船速計(Doppler speed log),其原理是藉由向水中發射脈衝音波,並量取反射訊號之都卜勒頻變而求出船速與距離。當船向前運動時,向前的接收器所收的頻率,高於發射頻率,向後的接收器所收的頻率,低於發射頻率,量取反射訊號之都卜勒頻變而求出船速。 都卜勒效應:音波頻率之觀察改變是由在振盪源和觀察者間行進之波動之有效距離時間速率改變所引起,當振盪源和觀察者之間之距離增加或減少時,接收頻率即隨之減少或加大。例如救護車接近中時聲音較大,離開中時聲音較小。 |